Exhibitors and Sponsors
CRAS 2023 is the perfect opportunity to showcase recent technologies, products, or prototypes, aiming to support and propose concrete measures to accelerate research and innovation in Robotic Surgery. Demo presenters will benefit from heightened exposure for their work at “Centro Congressi Federico II” in Napoli during CRAS Conference 2022, as well as feedback from many of the most renowned scientists in the field.
Haption
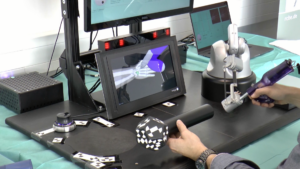
Looking for less costly and time-consuming training methods for hand surgeon procedures, one Haption customer have been developing a haptic and visual assisted VR-based training system. Using a force feedback device (Haption Virtuose 6D), Haptivist project renders realistic forces during simulated process helping surgeons to benefit of a good training and improve their skills. This demonstration at CRAS 2022 aims to feel and share on haptic technology potential for medical trainings.
FBGS
Fiber optical shape sensing, 2D and 3D shape sensing in robot assisted surgery
Fiber optic sensing solutions enable cutting-edge applications for robotic and standard minimally invasive surgery – such as real-time position tracking, instrument and catheter navigation, force, and curvature monitoring. At this year’s CRAS, FBGS will demonstrate a turn-key platform for shape sensing and share use cases from applying fiber optics in medical instruments. With the ongoing Artery project, FBGS will introduce a revolutionary hybrid system that combines shape and force sensing, and exploits robotics, artificial intelligence and augmented reality that make X-ray use redundant in the treatment of structural heart diseases. Customer issues and the solutions that FBGS was able to offer to answer their requirements will be discussed.
ICAROS Center & PRISMA Lab
The PRISMA Hand II is an anthropomorphic robotic hand replicating the grasping movements of the human hand. The underactuated design allows enhanced dexterity required for manipulation tasks in the healthcare environment. An innovative sensing system enables advanced control strategies in an intuitive scheme. The PRISMA Hand II is designed and developed at the ICAROS center and PRISMA Lab at Università degli Studi di Napoli Federico II.
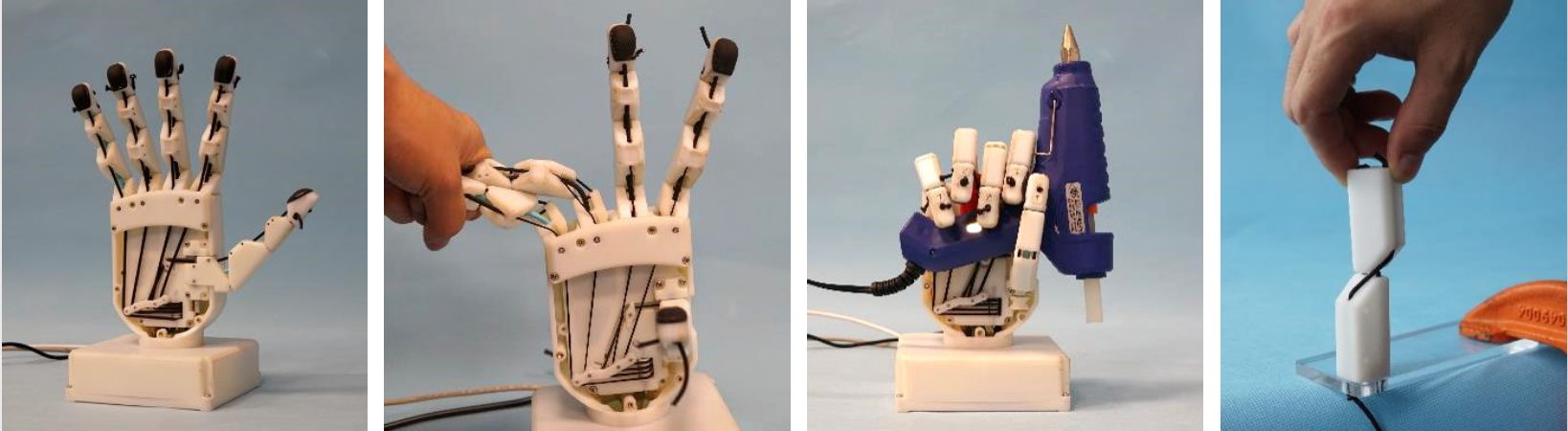
The MUSHA (MUltifunctional Smart HAnds) Hand II is a miniature hand with force sensors for manipulation and palpation of organs. The MUSHA Hand II, designed and developed at the ICAROS center at Università degli Studi di Napoli Federico II. The hand has three snake-like fingers and it is fully compatible with any surgical robotic platform.

Multi-level-assistance Robotic Platform for Navigation in the Urinary System
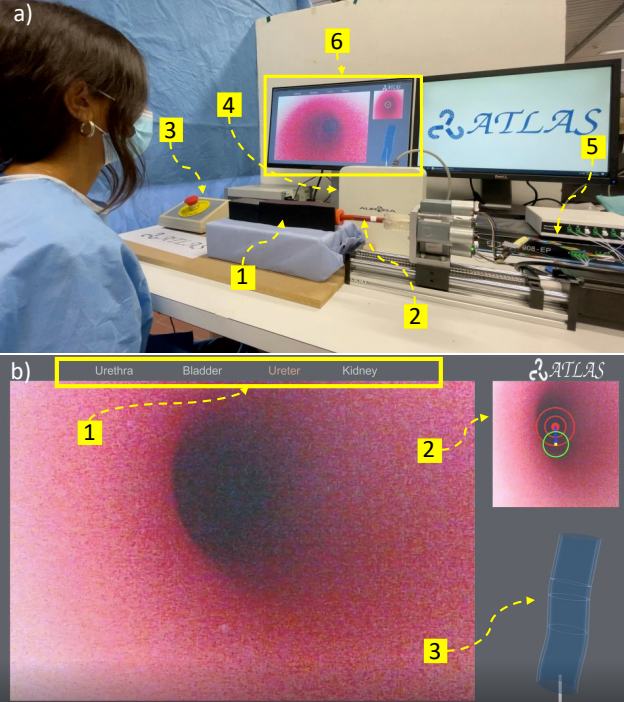
Performing ureteroscopy is a non-trivial task, and mastering it requires extensive training. Robotic Flexible Ureteroscopy offers an opportunity to overcome the mentioned challenges, ease the burden of the clinicians and offer better treatments for patients. The presented robotic platform aims at addressing the current challenges related to navigation in the urinary tract by providing a multi-steerable active catheter, a Graphical User Interface, a real-time tracking system of the position and shape of the device and suggestions for the user, and autonomous navigation control. The mechanical properties of the active robotic catheter and its autonomous and semiautonomous abilities could help clinicians prevent perforations and get support during the procedure.
Demonstration of a Proof-of-Concept Medical Robotic Platform for Endovascular Catheterization
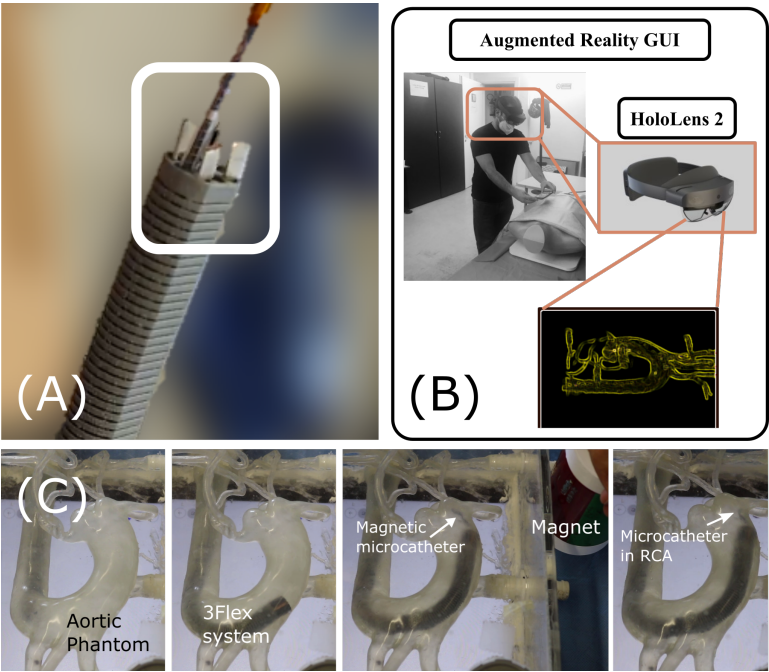
In endovascular interventions, vessels serve as access routes to deep and remote anatomic regions. Navigation through narrow, fragile, and deformable vessels in endovascular procedures requires considerable skill. Visualization during endovascular catheterization procedures mainly relies on fluoroscopy, an Xray based imaging modality that only offers two-dimensional views of the interventional scene. Intra-operative 3D vessel representations from non-ionising imaging sources could greatly improve ease of navigation of the medical instruments to target anatomic sites. We propose the demonstration of a prototype of a medical robotic platform aimed at endovascular catheterization. The system integrates several components: a multilumen catheter shaft, termed 3Flex, magnetically actuated microcatheter, augmented reality visualization and teleoperation. The 3Flex catheter is designed to carry within it two 6 degrees-of-freedom electromagnetic tracking sensors, a fibre Bragg grating for shape reconstruction, and a magnetically-actuated microcatheter.
VR - based neurofeedback for Emotion Regulation
VR-based feedback can be successfully employed in a training aiming at strengthening the emotional regulation (ER) capacity based on neurofeedback (NF). A wireless EEG system is used to acquire the signal from the channel locations FCz-CPz. Online processing allows the computation of the absolute power of the EEG signal in the beta2 band (20-34 Hz). Power values are sent to the VR application to provide feedback to the user. Images taken from the IAPS dataset and imported into the virtual environment are used to elicit a specific emotional state. The user is asked to regulate the felt emotion by means of cognitive reappraisal techniques. A successful regulation makes the color of the virtual room change on a pre-defined scale.

